
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
汽车用面漆选用条件
根据汽车的使用条件,产品品种和设计要求,在选择汽车用面漆或制定面漆技术条件时,应从以下几个方面来考虑:
(1)外观:符合生产条件的漆膜厚度和硬度、光泽、流平性、丰满度、色彩鲜明度,以保证汽车车身具有高质量的协调的外形。
(2)硬度和抗崩裂性:面漆漆膜应坚硬,具有足够的硬度,以防止涂层在汽车行驶中由于路面砂石的冲击和摩擦时产生划痕。一般烤漆130-140℃/30min,双组分自干或低温70-80℃/30-60min。
(3)耐候性:汽车用面漆涂膜在热带地区长期暴晒(≥12月),只允许轻微的失光和变色,不得有起泡、开裂和锈点。人工老化1000h,面漆失光率≤15%,变色或粉化≤1级。
(4)耐潮湿性和防腐蚀性:面漆与底漆、中途配套后,浸泡在水中或暴露在相对湿度高的空气中,面漆层不起泡、不变色、不失光。双组分丙烯酸聚氨酯涂料中面配套后,40℃/10d,面漆漆膜基本无变化。
先进的汽车面漆检测设备,确保涂层质量无可挑剔。河北非隧道式汽车面漆检测设备推荐厂家
汽车面漆检测设备
从而带动所述第二锥齿轮38转动,从而带动所述diyi锥齿轮43转动,此时所述螺纹套41转动带动所述螺纹杆40移动,从而带动左右两个所述滑动块46移动,所述滑动块46移动带动所述抛光轮44移动,由于此时所述机身10处于靠近需要补油漆的汽车表面一侧,所述三通阀56将右侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出抛光液从而对汽车表面进行油漆覆盖,同时启动所述diyi电机45带动所述抛光轮44转动,所述抛光轮44自转同时沿螺旋线移动,当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作,从而对修补后的油漆进行抛光,从而使修补油漆与汽车原漆融为一体;3、带到抛光完成后,手动转动所述手动轮27半周,此时所述第四转轴31带动所述第四锥齿轮30转动,从而带动所述第三锥齿轮29转动,从而带动所述蜗杆32转动,从而带动所述蜗轮34转动,所述蜗轮34转动带动所述diyi转轴22转动半周,此时所述花键杆23末端斜面朝上,此时所述机身10在所述顶压弹簧12作用下上移与所述限位块24贴合,此时反向转动所述手动轮27半周,从而带动所述花键杆23转动半周,此时所述花键杆23末端斜面朝下,设备恢复初始状态。郑州高精度汽车面漆检测设备这款检测设备能够准确评估汽车面漆的耐磨性。

目前国内多数车企均采用此种方案。通常人眼在正常视距(25cm)能分辨的较小尺寸约0.1mm左右。针对漆面缺陷检测,据统计约能达到70%~80%的检出率,但在灯带下长时间工作容易产生疲劳且对视力造成损害,并且无法精确提供缺陷种类及统计数据,很难满足需求。
隧道式漆面检测方案采用传统2D面阵视觉系统,将多台LED条光及相机按一定间隔部署在隧道式结构中,车辆通过隧道的同时完成检测。此种方案通常能达到80%~90%检出率,但需要大片单独检测区域,需要部署大量视觉传感器及光源,成本较高;且针对缩孔等微小缺陷检测效果不佳,同样很难满足需求。
与之相近的,为了在节约硬件成本的同时保证检测效果,部分高校研发了可移动式视觉采集系统,通过将视觉系统集成在导轨上,结合四周的大尺寸面光源实现车辆的完整扫描,但仍需要单独的工作区间,针对微小缺陷的检测效果依旧难以保证。
相位偏折法是一种镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。
深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。借助汽车面漆检测设备,轻松实现涂装质量的标准化管理。
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不仅可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。汽车面漆检测设备采用环保设计,降低涂装过程中的污染。锦州偏折光学法汽车面漆检测设备供应商家
这款汽车面漆检测设备具备高度灵敏性,轻松捕捉涂层细微变化。河北非隧道式汽车面漆检测设备推荐厂家
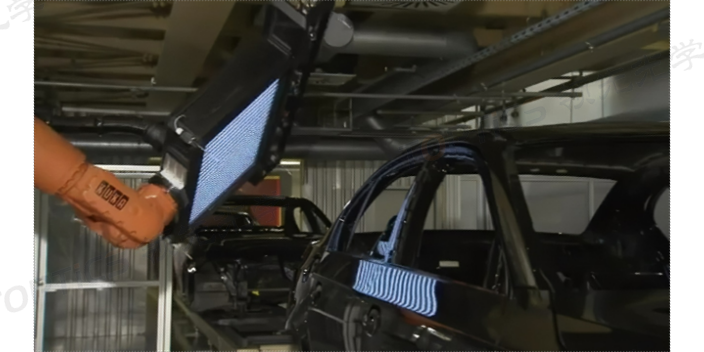
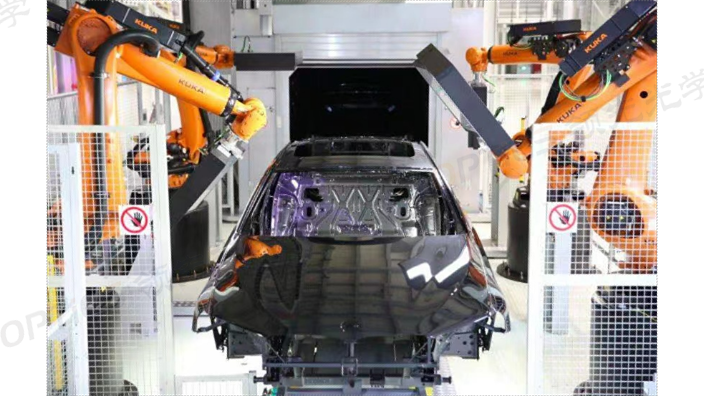
机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。河北非隧道式汽车面漆检测设备推荐厂家

物流仓储面临着机遇和挑战。如何在东风汽车现有基础上进一步优化仓储管理,以充分发挥仓储管理战略对企业竞争力的激励作用,变成了东风汽车现今Z紧迫的现实问题。2.东风汽车仓储管理实施现状仓储是在经济全球化与供应链一体化背景下的仓储,是现代物流系统中的仓储,它表示一项活动或一个过程,是以满足供应链上下游的需求为目的,在特定的有形或无形的场所、运用现代技术对物品的进出、库存、分拣、包装、配送及其信息进行有效的计划、执行和控制的物流活动。仓储的目的是为了满足供应链上下游的需求。在生产线上,色差仪和分光光度计通常会被整合进自动化控制系统,实现实时监控和即时反馈;本溪全自动汽车面漆检测设备生产厂家汽车面漆检测...
- 上海工业质检汽车面漆检测设备哪家好 2025-11-20
- 泉州偏折光学法汽车面漆检测设备价格 2025-11-20
- 武汉工业质检汽车面漆检测设备推荐厂家 2025-11-20
- 开封非隧道式汽车面漆检测设备生产厂家 2025-11-20
- 黄石全自动汽车面漆检测设备价格 2025-11-20
- 洛阳快速汽车面漆检测设备质量好价格忧的厂家 2025-11-20
- 襄阳代替人工汽车面漆检测设备供应商 2025-11-20
- 宁德代替人工汽车面漆检测设备哪家好 2025-11-19
- 郑州偏折光学法汽车面漆检测设备供应商家 2025-11-19
- 抚顺快速汽车面漆检测设备 2025-11-19



- 光学方法汽车面漆检测设备推荐厂家 2025-11-14
- 浙江汽车面漆检测设备源头厂家 2025-11-13
- 三明代替人工汽车面漆检测设备 2025-11-13
- 南昌光学方法汽车面漆检测设备源头厂家 2025-11-13
- 襄阳高精度汽车面漆检测设备质量好价格忧的厂家 2025-11-13
- 襄阳工业质检汽车面漆检测设备推荐 2025-11-13





- 宁波不规则玻璃面型检测 03-29
- 杭州翘曲度检测设备生产厂家 03-29
- 湖州翘曲度检测设备电话 03-29
- 合肥翘曲度检测设备报价 03-28
- 湖州微纳检测设备推荐 03-28
- 东莞汽车玻璃面型检测咨询 03-28
- 油漆面检测设备推荐 03-28
- 扬州特殊玻璃面型检测生产厂家 03-28
- 芜湖反光面检测设备公司 03-28
- 镇江在线玻璃面型检测推荐厂家 03-28