激光雷达定标板在自动驾驶领域的应用在自动驾驶行业,激光雷达作为 “车辆眼睛”,其测量精度直接关系到行车安全,而激光雷达定标板则是保障这一精度的关键环节。在自动驾驶车辆的生产线上,每台激光雷达需通过定标板完成出厂前的精细校准:通过发射激光束至定标板,对比接收的反射光信号与预设标准值,调整雷达的发射功率...
激光雷达定标板基本参数
- 品牌
- 广州瑞科光电
- 型号
- 齐全
- 类型
- 激光雷达定标板
- 规格
- 波长:200-2500nm;反射率:1%-99%
- 加工定制
- 是
- 厂家
- 广州瑞科光电科技有限公司
- 产地
- 广州
激光雷达定标板企业商机
ADAS系统自动驾驶感知车载激光雷达定标板应用:智能驾驶技术一般可分为感知、决策、执行三个环节。线控底盘则是高阶层自动驾驶汽车执行环节的载体,线控底盘主要包括线控制动、线控转向、线控悬架、线控油门等系统部件。相较人工驾驶的普通汽车,智能网联汽车技术依赖于感知的输入、计算模型以及道路场景数据,需要通过大量的道路测试来不断的训练自动驾驶的场景遍历性。道路测试和示范应用可以验证车辆在限定区域范围内的实际运行能力和人机交互能力,还可以提升公众对于自动驾驶技术的认知度和信赖感,为即将到来的智能网联汽车自动驾驶功能规模化应用奠定基础,是智能网联汽车技术研发和迭代升级过程中不可逾越的步骤。具备城市复杂道路的全无人驾驶能力的无人驾驶汽车,有方向盘和没有方向盘两个模式,配备8颗激光雷达,不同于以往人们在马路上见到的自动驾驶改装车,较为惹眼的是,主驾驶座上没有方向盘时,人们坐在车里可以办公、K歌、打游戏,一边前往目的地。激光雷达定标板通过使用先进的信号处理技术和算法,可以获得高精度的测量结果。广州激光雷达标定板一站式采购

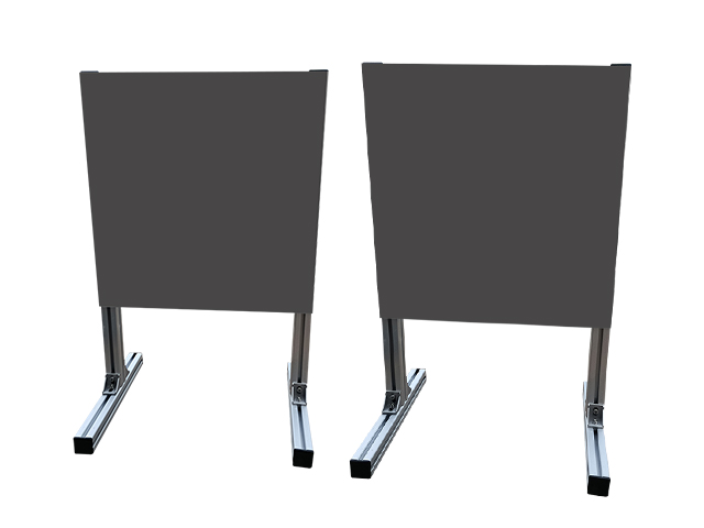
激光雷达标定板的基本使用方法:1、在激光雷达前方一定距离(激光雷达和摄像机都可以捕捉到信息的位置)设置一块反射率标定板(通常采用低中高反射率组合来校准,黑10%+灰50%+白90%),使标定板的板面垂直于地面(建议直接购买带滚轮支架的标定板方便移动),用于承接激光雷达的发射信号;2、在一定距离间选取n个距离值分别测量角点数据(指车体坐标系下的三维数据),以获取n组数据(需要多次变换标定板位置和角度);3、对激光雷达所采集的数据进行计算并转换,拼接多台激光雷达,即可实现对激光雷达的标定。低反射率激光雷达测试板费用在医疗领域,激光雷达定标板可用于人体结构和生物组织的精确测量。

激光雷达定标板于自动驾驶中的应用:随着自动驾驶和软件定义汽车的发展,快速推动智能网联汽车数量增长,使得智能汽车遭受网络攻击的风险日趋增大。智能汽车安全网关是专为智能网联汽车配备的专业车载安全防火墙,为智能汽车提供异构网络的组网方案,并有效抵御网络攻击的威胁。通过摄像头、雷达等精密部件去感知周围环境,再经过准确的感知分析并严格执行,进而就能避免危险情况的发生,并且机器也不会有“疲劳”的时候。而人类在驾驶汽车时,就会存在非常大的不确定因素,比如疲劳驾驶、路怒、不文明驾驶等行为。
激光雷达定标板——雷达极点分布的目标识别:目标的白然谐振频率又称为目标极点,激光雷达定标板,极点和散射中心分别是在谐振区和光学区建立起来的基本概念。目标极点分布只决定丁目标形状和固有特性,与雷达的观测方向〈目标姿态)及雷达的极化方式无关,因而给雷达目标识别带来了很大方便。目标极点的概念出现于1971年。1975年,Blaicum等首先提出了直接从一组瞬态响应时城数据来提取目标惜点的prony方法,使用提呶出的目标枝点作为目标特征,而通过将提取到的目标极点与目标库的目标极点进行匹配完成目标识别过程。80年代以来,关于目标极点的研究主要集中在如何提高算法本身的抗噪能力和估算精度方面。提取目标极点的函数束法(POF〉以及广义函数束法〈GPOF)等,80%激光雷达定标板,在极点的估计精度以及抗噪能力方面均优于Prony法。激光雷达定标板通过发射激光束并接收反射回来的信号来测量距离。

激光雷达(LIDAR)是一种用脉冲激光对目标物反射脉冲返回时间来丈量距离。激光返回时间和波长的不同,可采用数字三维表示法停止制造,目前被普遍称为光学(或光学成像、探测和测距),它是一种光和雷达的混合物。激光雷达,有时被称为三维激光扫描,是三维扫描和激光扫描的特殊组合。随着自动驾驶系统应用的迫切需求,近十年来降生了大量的相机-激光雷达外参自动标定的办法。这些办法依据原理的不同,能够大致分为基于特征的办法、基于运动的办法、基于互信息的办法和基于深度学习的办法。基于特征的办法从相机图像和激光雷达点云中分别提取特征,并依据特征的匹配来终止标定。激光雷达定标板在无人驾驶汽车中应用,为其安全行驶提供重要保障。低反射率激光雷达测试板费用
激光雷达定标板具有广泛的应用领域,如地形测量、海洋探测和建筑测量等。广州激光雷达标定板一站式采购
激光雷达测距标定板具有怎样的优点呢?激光雷达具有3D能力,能清楚的知道这是一个比较轻、比较薄的物体,对行车不会有太多影响。装在车顶的激光雷达还有车身的摄像头如果在雨天受到了污染,比如溅到泥点或者其他污染物等等。对摄像头而言,这些污物遮挡了对外界影像的采集,同样情况下,激光雷达并未受到影响。当然,激光雷达表面脏污到一定程度肯定也是会影响到性能的。这就需要激光雷达有能根据自身性能及时提醒车主清洁的能力。激光雷达的发射端持续、等间隔的发射激光雷达束,这些光束会等间距的扫描我们正前方视野区域的每一个点。这些光束发射到空间以后,如果在我们视野中的某一个点遇到了障碍物,它就会被障碍物反射,这些反射回来的激光会被接收端收到。根据这束激光的发射时间和接收到的时间之间的“时间差”再乘以“光速”,就可以推断出这个物体离我们有多远,由于激光的工作波长非常稳定,所以测距精度是相当高的。广州激光雷达标定板一站式采购
与激光雷达定标板相关的文章

无人驾驶测试校准
- 广州背光照明用激光测距板费用 2026-03-03
- 光学反射测试用激光雷达标定板品牌推荐 2026-03-03
- 智能机器人-激光雷达测试板厂家 2026-03-03
- 广州高稳定性激光雷达标定板供应商 2026-03-03
- 广州低反射率激光雷达标定板费用 2026-03-03
- 广州相机均匀性测试用激光雷达定标板定做 2026-03-02
- 空间遥感-激光雷达测试板哪家好 2026-03-02
- 广州智能机器人-激光雷达测试板品牌 2026-03-02
- 广州环光源均匀性分布测试用激光雷达测试板销售 2026-03-02
- 广州智能码头-激光雷达标定板优点 2026-03-02
- 广州目标定位用激光雷达标定板优点 2026-03-02
- 广州高准确性激光测距板价格 2026-03-01
与激光雷达定标板相关的产品




与激光雷达定标板相关的新闻
-
环境测试用激光测距板好处 2026-03-01 09:02:15激光雷达定标板的反射率设计需满足 “多梯度覆盖” 与 “波长精细适配” 两大原则,才能校准激光雷达的反射率识别范围与波长响应特性。首先,反射率梯度需覆盖激光雷达的实际检测场景,常规定标板会设计 3-5 个反射率档位(如 10%、30%、50%、70%、90%),分别对应低反射率目标(如沥青路面、黑色...
-
高稳定性激光雷达标定板价格 2026-02-28 09:02:16激光雷达定标板需定期送专业机构校准,周期受使用频率、环境条件、材质特性影响,不可一概而论,需科学制定以确保反射率基准稳定。实验室定标场景(每周使用 1-2 次,常温常湿环境,PTFE 材质):校准周期为 1 年,因实验室环境稳定,定标板表面磨损少,反射率年衰减≤0.5%,无需频繁校准;若使用高分子复...
-
广州90%反射率激光雷达测试板定做 2026-02-28 06:02:06激光雷达定标板需具备 “高漫反射性” 与 “抗激光损伤性”,这依赖特殊的表面结构设计与工艺处理。漫反射特性要求定标板表面呈现微观多孔或粗糙结构,使入射激光在表面发生多次散射,确保在 30°-80° 入射角范围内反射率变化≤2%(即激光雷达从不同角度测量时,定标板反射率基准稳定),避免因角度偏差导致定...
-
广州无人驾驶距离测试用激光测距板使用注意事项 2026-02-28 08:02:13安防监控中的激光雷达警戒系统,定标板是保障探测精细度的 “校准重心”。在边境、大型厂区的安防监控中,激光雷达需全天候监测非法入侵目标。长期运行后,雷达的探测灵敏度可能下降,此时定标板便派上用场。工作人员将定标板放置在雷达警戒范围内的不同距离处,模拟不同大小的入侵目标。通过雷达对定标板的探测响应,可校...
与激光雷达定标板相关的问题
新闻资讯
产品推荐
-

光谱分析石英光纤批发
2026-03-21 -
积分球系统-漫反射标准白板优点
2026-03-20 -

深圳红外石英光纤
2026-03-20 -
北京积分球石英光纤供应商
2026-03-20 -
广东光谱分析石英光纤多少钱
2026-03-20 -
广东传感器传输石英光纤价格
2026-03-20 -
南京积分球石英光纤报价
2026-03-20 -
南京2000波长石英光纤
2026-03-19 -
无锡激光传输石英光纤批发
2026-03-19