- 品牌
- 丰烨
- 型号
- 升降横移、平面移动、垂直升降、简易升降、垂直循环
两个支撑柱对应的一面分别固定连接有导轨,滑台左右两侧的顶端和底端分别活动连接有导向轮,四个导向轮分别与两个导轨活动连接,滑台的两侧固定连接有连接板,两个连接板分别与两个支撑柱远离的一面贴合。链条与滑台固定连接,链条远离滑台的一端与底板固定连接,油缸固定连接在底板的操作面且油缸的伸缩端与链条对应,滑台的操作面通过螺栓与上车台固定连接。上车台由边梁和波浪板组成,边梁与滑台通过螺栓固定连接,边梁的中空部分通过多个波浪板进行填充。锁紧装置的数量为多个,多个锁紧装置均匀固定连接在支撑柱上。保护装置由装置箱、推动杆、链条筒、主齿轮、副齿轮、齿轮板、导向板、滚轮和推动板组成,装置箱开设有矩形槽,装置箱固定连接在左侧支撑柱的远离滑台的一面,且支撑柱的连接板位于矩形槽内,矩形槽左右两侧的内壁分别与一个链条筒固定连接,两个链条筒对应的一面开设有推动孔,矩形槽内壁的顶端和底端分别活动连接有一个主齿轮,两个主齿轮均与一个链条的内圈啮合,链条的两侧分别位于两个链条筒内,位于矩形槽内的连接板与推动杆固定连接,推动杆穿过推动孔与链条内圈固定连接,位于底端的主齿轮与副齿轮固定连接,装置箱的底面开设有板孔以闸门杆的垂直端为起点,出口方向接地线圈占2/3,入口方向接地线圈比为例。上海自动升降横移停车设备设计

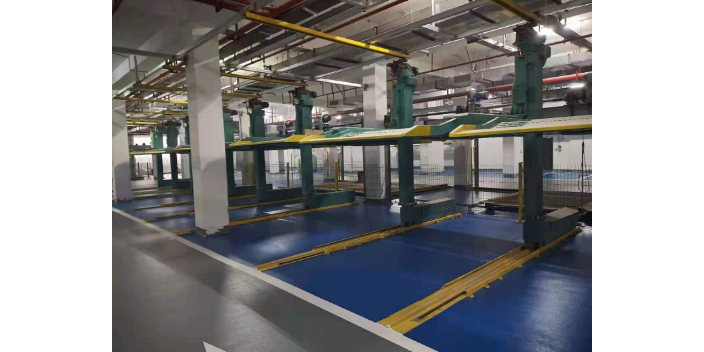
二层升降横移机械式立体停车设备主要结构和工作原理:二层升降横移机械式立体停车设备,主要由钢结构、升降车台、横移车台、升降机构、防坠器,以及电气控制系统等组成。升降车台、横移车台为停车位。升降车台通过四根链条,吊挂在钢架上,升降机构驱动链条,可使升降车台提升或降下,进行存取车;横移车台自带行走机构,可左右横移。标准型设备由5个车位组成,由一个集中控制单元进行控制。也可根据需要将2~4套标准型设备组合,由一个集中控制单元进行控制,而每个控制单元需一个空车位,以便升降车台能够降下(或升起)至下层存取车。下层存取车时,可将车辆直接开上(开下)横移车台,要进行上层存取车时,首先在操作箱上刷卡,系统识别IC卡对应的车位编号,在电脑的控制下横移车台向右(或左)移动,将空位移到所升降车台的下方,然后,升降车台降下(或提升),进行存取车。整个运动过程由电脑控制自动完成。二层升降横移机械式立体停车设备设有两套操作方式,一套为自动控制系统,一套为手动控制系统,正常情况下,存取上层车,由操作者在操作箱按键或刷卡,控制系统就可自动将对应的车位降下至底层。而手动操作系统,是在特殊情况下。杭州三层升降横移立体停车设备报价交通压力逐步从动态向静态转化,停车难是城市发展的一个公共性难题。

转动杆12的另一端延伸至电机腔内,电机腔的一侧内壁上通过焊接固定安装有电机10,电机10的输出轴与转动杆12延伸至电机腔内的一端相焊接。电机10的型号为m5140-002。本实施例中,四个滑槽11内均滑动安装有滑板15,四个滑板15中靠近转动轴3的两个滑板15的顶部均通过焊接固定安装有后轮固定块16,四个滑板15中的另外两个滑板15的顶部均通过焊接固定安装有前轮固定块17,载车板1的顶部设有两个车前轮8和两个车后轮7,两个前轮固定块17分别与两个车前轮8相配合,两个后轮固定块16分别与两个车后轮7相配合,两个三角斜板6分别与两个车后轮7相接触,载车板1的顶部通过焊接固定安装有前挡板9,前挡板9与两个车前轮8相接触,通过两个前轮固定块17对两个车前轮8进行夹持,两个后轮固定块16对两个车后轮7进行夹持,防止车侧移。本实施例中,转动杆12的外侧固定套设有两个齿轮14,两个齿轮14分别位于对应的两个滑槽11内,两个滑板15的底部均通过焊接固定安装有齿条18,两个齿条18分别与两个齿轮14相啮合,通过转动杆12带动两个齿轮14转动,通过两个齿轮14的转动带动两个齿条18移动,两个齿条18带动两个滑板15移动。本实施例中。
当日下午,新快报记者在一期地下停车库负二层和负三层看到,该两层几乎全部为上下机械停车位,上下为一组,左右有两横梁,上层为一受力板,整体为上下升降装置。左右机械停车位未连在一起,下层车辆挪开上层车辆才可出入。在机械停车位旁有四个简易按钮,分别为"上升/下降、启动/停止、紧急按钮和电源按钮。同时,每个机械车位上方都悬挂了一个告知牌,显示限高为上层和下层均为1.55m,限宽1.85m,限重2t。因为一期车位暂未正式出租出售,目前停放车辆较少。记者在负二层看到,有一辆中型汽车停在机械停车位外面,高度高于下层比较高处。此外,车库负三层和负二层机械停车位也存在一定差距,业主当场拿出尺子测量,有些上层机械车位因为顶层管道限制,高度不足1.3m。记者也站在多个机械车位下试验,有的下层高过记者头顶几个指头高度,有的已接触到记者头顶。接地线圈的嵌入位置:一般线圈的纵横为2米1米,线圈的位置由现场闸门的安装位置决定.。

两个前轮固定块17分别与两个车前轮8相配合,两个后轮固定块16分别与两个车后轮7相配合,两个三角斜板6分别与两个车后轮7相接触,载车板1的顶部固定安装有前挡板9,前挡板9与两个车前轮8相接触,通过两个前轮固定块17对两个车前轮8进行夹持,两个后轮固定块16对两个车后轮7进行夹持,防止车侧移。本实施例中,转动杆12的外侧固定套设有两个齿轮14,两个齿轮14分别位于对应的两个滑槽11内,两个滑板15的底部均固定安装有齿条18,两个齿条18分别与两个齿轮14相啮合,通过转动杆12带动两个齿轮14转动,通过两个齿轮14的转动带动两个齿条18移动,两个齿条18带动两个滑板15移动。本实施例中,位于车后轮7和车前轮8一侧的两个滑板15的一侧均开设有一螺纹槽21,两个一螺纹槽21内均螺纹安装有螺杆20,位于车后轮7和车前轮8另一侧的两个滑板15上均开设有第二螺纹槽,一螺纹槽21与第二螺纹槽内的螺纹旋向相反,两个螺杆20分别与两个第二螺纹槽螺纹连接,两个滑板15带动一个后轮固定块16和一个前轮固定块17移动,两个滑板15的移动使两个螺杆20转动,由于两个一螺纹槽21与两个第二螺纹槽的螺纹旋向相反,所以两个螺杆20的转动使另外两个滑板15朝着与前两个滑板15相反的方向移动。我司立体停车设备公司是一家集研发、生产、销售、服务于一体的现代企业。上海立体升降停车设备设计
进出机械停车设备时车主需要注意安全。上海自动升降横移停车设备设计
本实施例的检测装置不会受到光线等环境因素的影响,机械式的检测方法来检测位置变化更加准确,本实施例的后吊点防松检测装置6中设有讯号模块,向plc输出限位撞针60的角度变化讯息,限位撞针60先是抵紧在连接后吊点的钢丝绳上,只要后吊点的钢丝绳一直保持张紧状态,限位撞针60的抵紧状态不会改变,不会触发检测信号,扭簧62为限位撞针60提供复位的趋势力,钢丝绳一旦松弛,抵紧限位撞针60的力不在存在,限位撞针60在扭簧62的作用力下复位,角度发生变化,即触发了检测信号,及时控制升降传动机构3停止。实施例3本实施例的松动自检立体停车设备,在实施例2的基础上做进一步改进,所述角度a为60°~90°。在该角度范围内,后吊点防松检测装置6的检测为灵敏。实施例4如图5和图6所示,本实施例的松动自检立体停车设备,在实施例1~3的基础上做进一步改进,所述的前吊点防松检测装置7包括支座一70、摆臂71、滚轮72、支座二73和限位开关74;所述支座一70和支座二73相邻设置在移动框架2顶面;所述摆臂71一端和支座一70铰接,另一端转动式连接有滚轮72;所述滚轮72置于连接前吊点的钢丝绳上;所述限位开关74固定连接在支座二73上,所述限位开关74的触发端位于摆臂71下落的路径上。上海自动升降横移停车设备设计


- 新疆停车设备价格 2024-12-27
- 杭州多层升降停车设备维保 2024-12-27
- 新疆停车设备造价 2024-12-27
- 上海家用升降停车设备造价 2024-12-27
- 西安垂直升降立体停车设备生产厂家 2024-12-27
- 停车设备报价 2024-12-27
- 西安停车设备 2024-12-27
- 乌鲁木齐升降横移类停车设备 2024-12-27