华数HSR-JR650L机器人应用于码垛、搬运、打磨的市场优势尤为明显,有助于增强企业智能化程度,加强企业生产安全性。HSR-JR650L机器人拥有50kg负载能力,臂展2400mm,合理设计工装夹具后,机器人可实现重复定位精度0.07mm的重复性工作。华数HSR-JR680机器人有效负载80kg,臂展达2200mm,具有高刚性、强过载、长寿命的特点。该款机器人在整机设计上采用拓扑优化技术,保障机器人高刚性的同时,有效提升运动节拍和承载能力;4-6关节采用电机后置结构,提升手腕灵活性;高精密高刚度减速机可提升机器人20%以上承载能力HSR-JH605焊接机器人能够在狭小空间作业,性能稳定可靠可满足柔性化生产需求,可快速投入生产。北京桌面式6轴机器人
HSR-JH620 工业机器人是一款高速高精度通用性6轴机器人,具有臂展2m,负载能力15KG和臂展1.8米,负载能力20KG两款机型,小臂和手腕采用大直径中空设计,小臂比较大过孔直径φ45mm,手腕比较大过孔直径φ50mm,在焊接和打磨应用中便于布置工具管线,很大程度减少末端管线干涉,小臂防护等级达到了IP67,适用于机床上下料等众多的工况,HSR-JH620 工业机器人以极高的速度、精度指标将有效帮助各大企业提升生产质量和效率,获取超预期收益。北京桌面式6轴机器人工业机器人轨迹支持三种插补方式,分别是关节插补,直线插补,圆弧插补, 插 补 命 令 分 别 是 MOVJ,MOVL,MOVC。
通用六关节工业机器人-JR系列产品简介:JR603为6轴工业机器人,适用于装配领域;JR605为6轴工业机器人,适用于手机打磨、视觉引导和装配领域;JR612为6轴工业机器人,适用于上下料、弧焊、打磨、喷釉;JR620L为6轴工业机器人,适用于机床上下料、切割、去毛刺、喷釉;JR630为6轴工业机器人,适用于机床上下料、打磨应用领域;JR650为6轴工业机器人,适用于机床上下料,五金打磨,去毛刺;JR6210为6轴工业机器人,适用于点焊、汽车冲压件搬运、工业机器人加工。
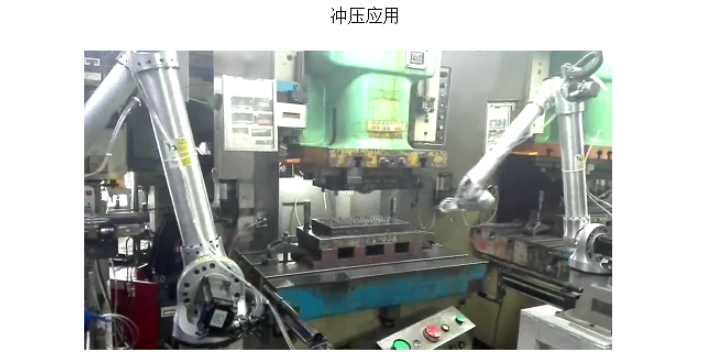
从目前中国工业机器人应用分布领域来看,主要集中在焊接、喷涂、装配、包装、码垛搬运、抛光打磨等领域。其中焊接、搬运码垛是占比较大的两大领域。焊接行业工作环境恶劣,存在烟尘、弧光、金属飞溅等,容易对人体造成极大伤害,因而对机器代人提出了迫切需求,也为焊接机器人的应用提供了广阔的的空间。随着**制造需求日益爆发,焊接机器人市场有望进一步乘风而起。为解决更多制造业的痛点,我们推出了全新升级款焊接机器人HSR-JH605。工业机器人可满足3C行业柔性化生产需求,可快速投入生产,提高生产效率。

HSR-JR603/JR605是一款小型多用途机器人,为满足3C生产的“高精度、轻量化、快速度”等高要求而生。整机采用轻量化设计,体积小,安装方式灵活,采用自主研发**零部件,拥有高性能的同时具有较大成本优势,广泛应用于涂胶、搬运、分拣、装配等领域。结构紧凑、体积小、重量轻、关节速度高、动态响应快,荷重5kg,具有低投资、高产出优势。满足快速拾放,具有极大的灵活性。在保持六轴机器人的通用性情况下其结构紧凑,重复定位精度高,响应快。该六轴机器人可高效完成上下料、分拣、装配、打磨以及其他加工应用的工作任务。BR616具有IP67的高防护性,可满足任意方向喷水或浸水。北京桌面式6轴机器人
全新升级款装配机器人HSR-JR607,进一步提高企业生产效率、稳定装配质量。北京桌面式6轴机器人
华数六轴工业机器人结构特性BR系列六轴工业机器人打破定势,突破传统,在通用六轴工业机器人的基础上,进行目前全世界独有的创新设计,惯量小,提高机器人运动性能,达到高速、高精度特性;新增内旋转功能,实现前后点位快速度。二、BR系列六轴工业机器人功能特性发明内旋转结构及控制方法,有效降低运动过程中惯量,并配以高速电机及本体轻量化设计,轻松实现高速度。空间占用小,运动非常灵活,专为CNC高速钻工中心及快速冲床特殊设计;北京桌面式6轴机器人
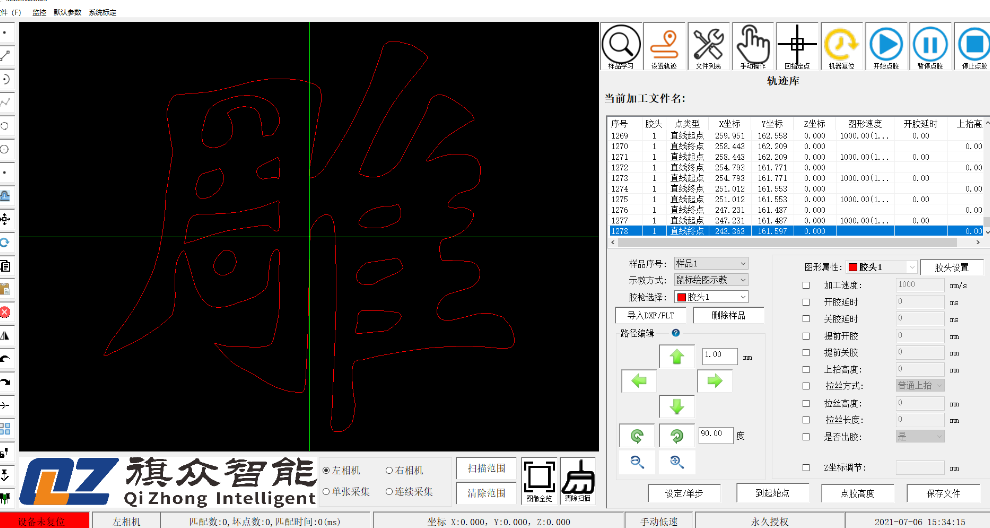
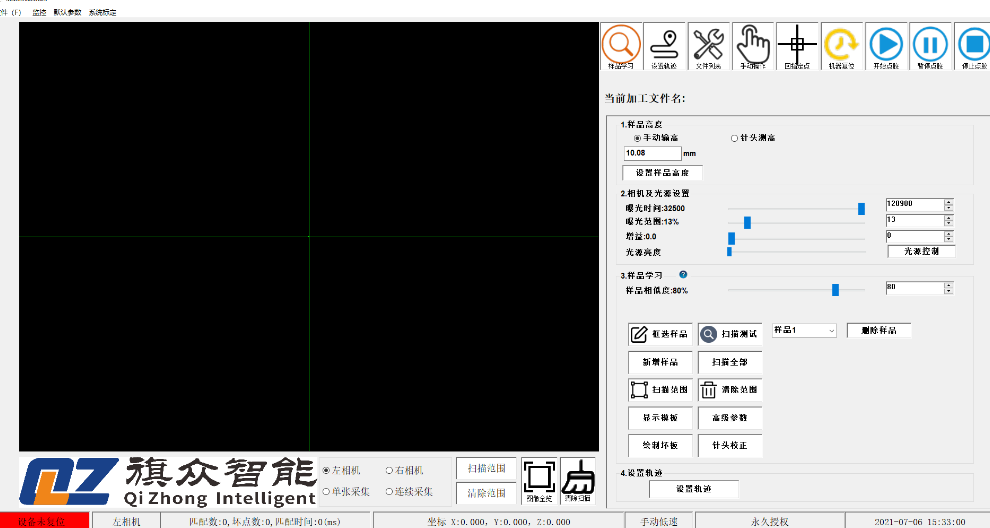
深圳市旗众智能科技有限公司位于宝龙街道宝龙社区宝荷大道76号智慧家园二期2B2204,交通便利,环境优美,是一家生产型企业。是一家有限责任公司企业,随着市场的发展和生产的需求,与多家企业合作研究,在原有产品的基础上经过不断改进,追求新型,在强化内部管理,完善结构调整的同时,良好的质量、合理的价格、完善的服务,在业界受到宽泛好评。公司业务涵盖视觉点胶系统,点胶软件,点胶控制系统,辅料贴附系统,价格合理,品质有保证,深受广大客户的欢迎。旗众智能将以真诚的服务、创新的理念、***的产品,为彼此赢得全新的未来!