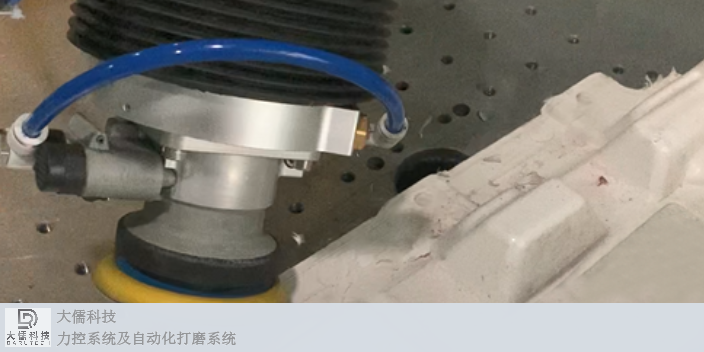
DFC力控系统是用于自动化打磨抛光领域的力控制执行系统。安装于需要实现柔性智能打磨功能的设备末端,比如机器人手臂,直接执行打磨的预设指令,机器人负责路径的执行。力控系统功能:1.柔性控制:在打磨机接触工作的瞬间,以及运行过程中,力控系统以柔性浮动方式,主动适应工件表面的尺寸变化,将力的大小始终控制在所需范围之内。2.不受角度与奋力的影响:可对工件三维空间外形任何角度进行抛光打磨。3.瞬间响应:力控系统在运行过程中,可根据工件表面的变化,瞬间浮动调整,将力的大小控制在所设定范围之内。4.降低机器人示教精度要求:机器人示教只需设定好运行路径,工件表面压力由力控系统完成,机器人示教变得很简单,减少了示教工作的时间,提高了生产效率。5.分段力控功能:此功能可以根据机器人不同路径,分段设定每条路径所需力的大小。6.配方功能:多可保存255个配方,根据对应工件型号随时调用。7.兼容性:本产品适用于各个品牌机器人。8.吸振功能:可降低再打磨抛光过程中,打磨机的高频率振动对打磨机本身和机械手的损伤。DFC力控系统目前有多个型号,适合不同打磨、抛光工作场景。力控系统柔性打磨过程。 大儒科技的打磨力控系统的可以支持:ProfiNet , TCP/IP和I/O通信。唐山本地力控打磨答疑解惑

针对薄壁件的自动打磨问题,安装使用智能打磨力控系统是简单有效的恒力打磨加工方法。通过在KUKA工业机器人末端的气动柔顺力控制功能使得打磨工具始终压紧被加工表面,且压力大小保持恒定,根据规划路径调整机器人的末端位姿,同时按照设定参数自动更换砂纸等耗材,进一步保证打磨的质量。目前加工轨迹表面复杂、精度要求高的自由曲面类零件打磨抛光基本都是由人工手持作业工具并依赖于工人的经验来完成的,这很难保证自由曲面零件的形位精度、表面微观物理属性,且制造成本较高,制约了成型模具加工技术的发展;尤其是目前的人工作业难以保证质量的一致性及加工效率,据统计精整加工占整个模具制造工时的42%左右,繁重的作业任务及低效率使得某些装备的研制周期受到严重的影响。重庆精密力控打磨欢迎选购打磨力控系统应用于机器人实现打磨抛光过程中打磨力的柔性控制。

焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿工件本体、焊接过程以及工装所导致的误差,就能实现柔性打磨加工作业。但对于不规则焊缝打磨,除了要定位位置和检测余高之外,还需要准确识别,因此要采用3D视觉检测系统,3D镜头+算法的测量模式,对工件焊缝3D扫描数据进行分析,实现焊缝的识别、准确定位和测量,对焊缝进行智能打磨。木材制品打磨有其行业标准:AQ4228-2012木材加工系统粉尘防爆安全规范,规定了工业生产中木材及木制品、人造板、木粉的加工处理系统中产生的木质及其他纤维质材料的粉尘的防爆安全要求。所以,用于这方面的机器人需为防爆机器人,若没有防爆系统,那必须给机器人穿上防爆外衣,这样可以很大程度上降低粉尘爆燃的风险。
打磨是一种表面改性的工艺技术,应用普遍。常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。此外,大批量产品和产品换线频繁的打磨作业,对人工打磨的熟练程度、以及打磨成本效率提出了更为苛刻的要求。打磨机器人系统是一种可以完成大批量产品、各种形状产品或降低甚至消除打磨对人体健康伤害的新型打磨作业模式,能改善工人的工作环境、提高产品的一致性,降低产品生产成本,因而机器人打磨系统应用越来越多。与手持打磨相比较,机器人打磨能有效提高生产效率,降低成本,提高产品合格率,但是由于机械臂刚性及定位误差等因素,采用机器人夹持电动、气动打磨头进行打磨处理时,容易出现断刀或对工件造成损坏等情况,因此影响打磨效率、打磨精度,且无法适应工件的表面复杂形状的变化及产品快速换线要求。而现有的控制系统只能控制机器人位置。为了弥补以上设计缺陷,本发明提出一种柔性打磨控制系统和方法。技术实现要素:为克服现有技术的不足,本发明提供一种柔性打磨控制系统和方法,提高打磨效率以及打磨精度,增加打磨工件的适应范围。智能柔性打磨力控系统用于打磨、抛光、拉丝、去毛刺等批量自动化生产应用场景。
而且传统的工件清理技术使用位置支配法则,因需尽量准确地确定机器人运转路径,编程工作繁复而耗时。传统技术尽管在学说上可获得恒定的研磨抛光质量,然而实情并不尽如人意,加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控系统由二种先进的基本机能构成。一种是压力控制机能,当机器人展开工件打磨抛光时,该机能可维持打磨工具对铸件的压力自始至终不变:另一种是变速控制功用,当机器人对工件的表面或分型线展开去毛刺、去飞边操作时,该机能可持续操纵其操作速度。大儒科技的打磨力控系统的特点:柔性浮动力控执行系统,降低了机器人编程的难度,变得非常简单。上海直销力控打磨技术指导
DFC智能柔性打磨力控系统有多个型号,适合不同打磨、抛光工作场景。唐山本地力控打磨答疑解惑
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。唐山本地力控打磨答疑解惑
大儒科技(苏州)有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,大儒科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!




