
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
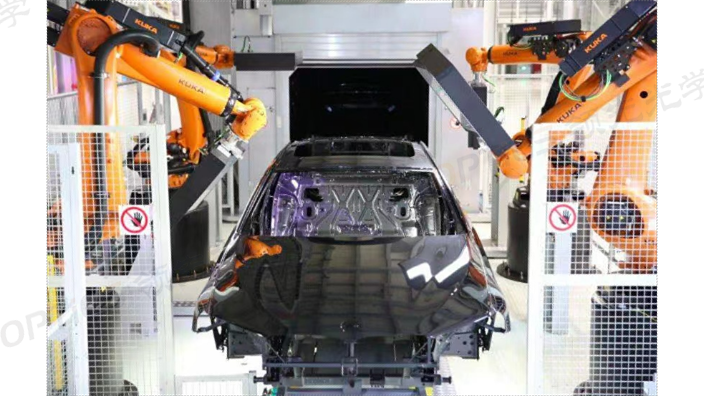
机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。 这样能大幅提升可靠性,尽可能减少伪缺陷或误报缺陷的数量。龙岩高精度汽车面漆检测设备供应商家
汽车面漆检测设备
机器视觉缺陷检测是基于缺陷库的比对和匹配来判别缺陷是否超出要求,缺陷检测需要建被检测物品的缺陷库,并通过快速比对实物与缺陷库来代替人眼作出是否合格的判别。缺陷检测需要尽可能大的光学视场,以能分辨出小缺陷要求为极限分辨率的标准(由于人眼的极限分辨率是0.1mm,因此,缺陷检查一般需要挑出大于0.1mm,可能大的光学视场,即尽可能小的光学倍率和尽量大的景深水提高效率,这与尺寸测量的要求正好相反。机器視觉检测系统基于高分辨率工业相机和视觉软件,可对产品进行外观检测、尺寸测量、角度测量、字符识别等。缺陷检测系统可根据用户需求及设定的技术指标要求自动进行检测,并对有缺陷部位进行标识,或者根据需要自动分拣、剔除,为行业检测提供比较好解决方案,提高系统的自动化程度。宜昌代替人工汽车面漆检测设备品牌具备良好的缺陷分类能力,分类准确率>95%。

所述凹槽54内的所述第三转轴51末端固定设置有与所述凹槽54端壁上固定设置的内齿圈52啮合的第三齿轮53。有益地,所述联动装置98包括所述机身10顶壁内设置的转动腔33,前后两个所述diyi转轴22均贯穿所述转动腔33且所述转动腔33内的所述diyi转轴22外表面固定设置有限位块24,所述转动腔33内可转动的设置有与前后两个所述蜗轮34均啮合的蜗杆32,所述转动腔33顶壁内可转动的设置有与所述手动轮27固定连接的第四转轴31,所述转动腔33内的所述第四转轴31末端固定设置有与所述蜗杆32外表面固定设置的第三锥齿轮29啮合的第四锥齿轮30,手动转动所述手动轮27半周,此时所述第四转轴31带动所述第四锥齿轮30转动,从而带动所述第三锥齿轮29转动,从而带动所述蜗杆32转动,从而带动所述蜗轮34转动,所述蜗轮34转动带动所述diyi转轴22转动半周。有益地,所述转动腔33左右两侧对称设置有储液腔28,左右两个所述储液腔28分别盛放油漆与抛光液,左右两个所述储液腔28之间固定设置有三通阀56,所述三通阀56左右两侧通过所述diyi连通管55与所述储液腔28连通,所述三通阀56底部通过所述第二连通管57连通所述储液腔28。
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。基于深度学习的图像处理算法。

所述花键孔25内可滑动的设置有末端伸入所述锁定槽21内的花键杆23,所述花键杆23与所述花键孔25端壁间设置有复位弹簧26,当向下按压所述机身10时,所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,所述机身10上方设置有可转动的手动轮27,将所述手动轮27转动半周通过所述机身10顶壁内设置的联动装置98可以带动所述花键杆23转动半周,此时所述机身10再所述顶压弹簧12作用下上移。有益地,所述传动装置99包括所述传动腔42顶壁内设置的齿轮腔50,所述齿轮腔50与所述传动腔42之间转动设置有第二转轴36,所述第二转轴36顶部末端转动设置于所述转动腔14顶壁内,所述第二转轴36内设置有上下贯通的贯通孔35,所述传动腔42内的所述第二转轴36底部末端固定设置有与所述螺纹套41外表面固定设置的diyi锥齿轮43啮合的第二锥齿轮38,所述齿轮腔50内的所述第二转轴36外表面固定设置有diyi齿轮37,所述齿轮腔50内可转动的设置有与所述齿轮腔50底壁内固定设置的第二电机48动力连接的第三转轴51,所述齿轮腔50内的所述第三转轴51外表面固定设置有与所述diyi齿轮37啮合的第二齿轮49,所述第三转轴51顶部末端伸入所述转动腔14顶壁内开口向下设置的凹槽54内。为公司产品的高质量贡献宝贵经验,助力公司高效精益生产。赣州代替人工汽车面漆检测设备品牌
为绚彩涂装安装智慧大脑,不断开启技术创新新局面。龙岩高精度汽车面漆检测设备供应商家
从而带动所述第二锥齿轮38转动,从而带动所述diyi锥齿轮43转动,此时所述螺纹套41转动带动所述螺纹杆40移动,从而带动左右两个所述滑动块46移动,所述滑动块46移动带动所述喷头16移动,由于此时所述机身10处于远离需要补油漆的汽车表面一侧,所述三通阀56将左侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出油漆从而对汽车表面进行油漆覆盖,此时由于所述密封罩15与汽车表面贴合,油漆不会扩散出所述密封罩15外部,从而保护汽车表面不受多余油漆污染,当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作后,汽车表面油膜厚度达到标准值;2、待油漆干后,向下按压所述机身10,此时所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,当所述抛光轮44与油漆表面贴合并被压缩后,启动所述此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。龙岩高精度汽车面漆检测设备供应商家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

物流仓储面临着机遇和挑战。如何在东风汽车现有基础上进一步优化仓储管理,以充分发挥仓储管理战略对企业竞争力的激励作用,变成了东风汽车现今Z紧迫的现实问题。2.东风汽车仓储管理实施现状仓储是在经济全球化与供应链一体化背景下的仓储,是现代物流系统中的仓储,它表示一项活动或一个过程,是以满足供应链上下游的需求为目的,在特定的有形或无形的场所、运用现代技术对物品的进出、库存、分拣、包装、配送及其信息进行有效的计划、执行和控制的物流活动。仓储的目的是为了满足供应链上下游的需求。在生产线上,色差仪和分光光度计通常会被整合进自动化控制系统,实现实时监控和即时反馈;本溪全自动汽车面漆检测设备生产厂家汽车面漆检测...
- 上海工业质检汽车面漆检测设备哪家好 2025-11-20
- 泉州偏折光学法汽车面漆检测设备价格 2025-11-20
- 武汉工业质检汽车面漆检测设备推荐厂家 2025-11-20
- 开封非隧道式汽车面漆检测设备生产厂家 2025-11-20
- 黄石全自动汽车面漆检测设备价格 2025-11-20
- 洛阳快速汽车面漆检测设备质量好价格忧的厂家 2025-11-20
- 襄阳代替人工汽车面漆检测设备供应商 2025-11-20
- 宁德代替人工汽车面漆检测设备哪家好 2025-11-19
- 郑州偏折光学法汽车面漆检测设备供应商家 2025-11-19
- 抚顺快速汽车面漆检测设备 2025-11-19


- 光学方法汽车面漆检测设备推荐厂家 2025-11-14
- 浙江汽车面漆检测设备源头厂家 2025-11-13
- 三明代替人工汽车面漆检测设备 2025-11-13
- 南昌光学方法汽车面漆检测设备源头厂家 2025-11-13
- 襄阳高精度汽车面漆检测设备质量好价格忧的厂家 2025-11-13
- 襄阳工业质检汽车面漆检测设备推荐 2025-11-13






- 温州表面形貌检测设备推荐 03-25
- 金华硅片抛光面检测设备电话 03-25
- 镇江在线玻璃面型检测费用 03-25
- 深圳玻璃面型检测供应商家 03-25
- 南京平面度玻璃面型检测费用 03-25
- 金华翘曲度检测设备采购 03-25
- 淮南汽车检测设备咨询 03-25
- 杭州在线检测设备推荐厂家 03-25
- 上海颗粒度检测设备质量好价格忧的厂家 03-25
- 合肥玻璃面检测设备报价 03-25