在现有技术中,金属表面的打磨处理目前大部分还依赖于人工,专机打磨和机器人打磨的表面粗糙度不稳定导致良率不高且对后续的表面处理带来很大的影响。
目前市面上打磨机器人还存在一些未能解决的问题:a、局限于手臂垂直平面的打磨,手臂角度不可变化,否则会受到角度产生的分力影响;b、打磨机快速触碰到产品时,由于机器人执行动作的响应速度比系统运算速度慢,会产生超出力控要求的很大的一个力,大幅度影响产品的品质,因此只能慢速的靠近,从而影响生产效率;c、当打磨机刚触碰到产品或在打磨过程中碰到一个超出控制力范围的力值时,打磨机会有跳动现象,会造成产品表面粗糙度不一致,从而影响产品的品质稳定。
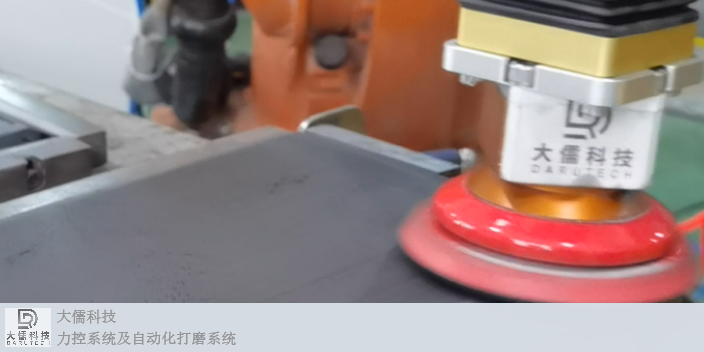
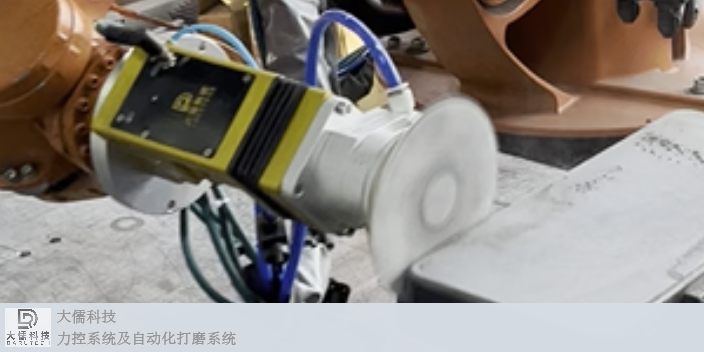
在机器人手臂末端安装力控系统和打磨机,力控系统瞬间接触产品及运行过程中采用柔性浮动的控制方式,受力瞬间即可迅速反应作出调整,确保力的控制精度,实现智能柔性的力控打磨。 直销力控打磨研磨

目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。郑州智能力控打磨控制系统

机器人打磨采用了智能打磨力控系统,以及打磨工具、自动换砂纸设备。可以替代人工和去毛刺的机床设备,用于对铸件、钣金件、洁具、电脑笔记本、手机等壳体的打磨、去毛刺自动化加工。机器人研磨自动化系统从加工零件和产品的表面快速有效地去除多余的材料。无论在什么行业,批量生产中有打磨工序,就不能没有自动化设备,而打磨工艺作业的非标准性及对打磨动作的灵活要求,成为通用打磨机的技术障碍。将打磨机和机器人结合成为单个机器人打磨系统或完整的机器人打磨设备,辅以传输线和相应的夹具技术研发成完整的打磨工序自动化生产线,可高效完成非标准件的自动化打磨作业工艺。对不同材质的零件进行精密打磨本身就是一门科学。它要求生产商配备自动化打磨机、打磨设备和生产线、打磨过程的专业知识、适当的打磨技术以及正确的打磨工序。
去毛刺飞边机器人是用于材料去除毛刺,锐边处理,或鳍过的金属部件。六轴去毛刺机器人带动铣刀能向人手拿锉刀一样,从铸件四周和上面的任意角度和位置,非常灵活、快速、准确去掉铸件表面的料口和合模线,深孔内部的毛刺及铣通和整理一些应贯通而被铝皮覆盖的孔。工业生产中的部分零配件需要对其外表面进行打磨抛光,比如圆棒工件,现有技术中,采用电机驱动的砂轮对圆棒工件的外表面进行打磨,圆棒工件都有一定的长度,实际打磨时砂轮固定不动,圆棒工件移动,砂轮与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,存在打磨效率低,圆度不一致的缺陷,有待于改善。为解决上述技术问题,智能柔性打磨力控系统安装在机械手上,力控打磨使得不变化圆棒工件安装位置的情况下一次性打磨结束,打磨效率高,工件打磨后的圆度一致性好,简单实用。
打磨工具应用于产品表面加工,用以实现产品的去披锋、修边、打磨和抛光等工艺需求。打磨工具工作时,磨片与待打磨产品之间接触的力为打磨压力,打磨压力过大会损坏磨片和电机主轴,甚至会造成产品表面有凹坑,打磨压力过小会影响打磨效果,且该打磨压力需要随着产品的形变量、产品的材料及工艺的改变而进行调整。但是当待打磨的产品尺寸存在偏差或者材料发生改变时,常规的打磨工具无法适应性地改变其打磨压力,容易造成磨片损坏,且影响产品的打磨效果。大儒科技的智能柔性打磨力控系统,也是一种恒力打磨工具,可以提供可调节打磨压力、提高打磨效果、延长磨片使用寿命。力控系统可安装于工业机器人的第六轴或者安装于非标机械手的末端,以实现对产品的打磨。打磨力控系统安装于机器人或者机械手上,在进行批量打磨时,会提前设定好打磨路径,若待打磨的产品存在形变量时,采用普通的打磨工具,即采用无法设置打磨压力的打磨工具将会产生打磨效果不佳的问题,当待打磨的产品往远离磨片的方向变形时,磨片接触不到产品,会导致漏打磨;当待打磨的产品往靠近磨片的方向变形时,可能会损坏磨片,也会造成多打磨的情况。直销力控打磨研磨
直销力控打磨研磨
因需要尽可能精确地确定机器人运行路径,编程工作复杂而耗时。传统技术尽管在理论上可获得恒定的研磨抛光质量,然而事实并不尽如人意,加工后的铸件往往前后品质不一,公差各不相同,难以获得稳定的工艺效果。关于复杂构造的工件、毛刺散布分散的工件也能对应。而且机器人具有可编程性,新的产品导入只需求改换工装治具,顺序切换就能完成。这使设备具有更高的柔性化,更合适目前企业的需求。同机遇器人打磨的方案能增加工人休息强度或间接省去工人,无效保证加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是明显的,纵使设备投入本钱略高,也越来越多被企业承受。随着机器人力控技术的发展,浮动机构和打磨工具的使用,如同人手滑过工件毛刺般进行柔性去除毛刺,能有效避免造成打磨工具和工件的损坏,吸收工件及定位等各方面的误差。力控软件由二种先进的重点功能组成。一种是压力控制功能,当机器人进行铸件研磨抛光时,该功能可保持打磨工具对工件的压力始终不变:另一种是变速控制功能,当机器人对铸件的表面或分型线进行打磨、去飞边操作时,该功能可持续控制其操作速度,在遇到较大凸起时能自动减速运行。直销力控打磨研磨
大儒科技(苏州)有限公司是一家服务型类企业,积极探索行业发展,努力实现产品创新。大儒科技是一家私营有限责任公司企业,一直“以人为本,服务于社会”的经营理念;“诚守信誉,持续发展”的质量方针。以满足顾客要求为己任;以顾客永远满意为标准;以保持行业优先为目标,提供***的力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人。大儒科技自成立以来,一直坚持走正规化、专业化路线,得到了广大客户及社会各界的普遍认可与大力支持。