打磨柜打磨台打磨柜处理器采用下抽上排内循环的工作方式。其设计原则是在满足生产工艺要求的前提下,主要从打磨工人的工作环境,设备的运行可靠,操作维修便利等几方面考虑,改善工作区的作业环境。含尘气体由进风口进入粉尘处理器箱体内,首先经过整流板,含尘气体均匀的分散到各滤筒四周,由于滤筒的多种效应作用,被阻止在滤筒外壁。净化后的气体通过滤筒经箱体出风口排出。随着使用时间的增长,滤筒表面吸附的粉尘逐渐增多,滤筒的透气性减弱,除尘器阻力不断增大。为了保证除尘器的阻力控制在限定的范围之内,由脉冲控制仪发出信号,循序打开脉冲电磁阀,使压缩空气由喷吹管各喷口喷射到对应滤筒,造成滤筒内瞬间气体膨胀,使积聚在滤筒外壁上的粉尘抖落,进入积灰箱。积灰箱采用推拉式结构,清灰过程快捷方便。上面设有卸灰板,保证灰尘全部集中到积灰箱。 本地力控打磨操作简单

打磨机器人在卫浴五金这个行业的应用,大多数情况下要配合打磨抛光力控系统。因为这个行业的产品大多是不规则的,类似水龙头、门把手等工件,外形曲面、曲线比较复杂,因此多方面配合完成。首先是编程调试;第二是柔性力控制,通过打磨机进行磨削,要求能够快速响应磨削应力的变化,保证力控具有一定精度;第三是自动位置/磨损补偿功能,这可以跟踪检测耗材的磨损情况,适时调整打磨轨迹,保证打磨质量,通过压力补偿、速度补偿来实现。在精度上,像传统的一定定位精度,力控系统通过DH补偿、重力补偿、多点标定、误差补偿算法,将一定定位精度提升到±。另外就是一定路径保持,因为在整个运动过程中,路径跟踪精度也是需要保持的。以往经验来看,当机器人在低速运行时,是能很好的按照规定路线运行的,但在高速时就会存在偏差,这就好比弯道超车。力控系统通过改进路径算法,摆脱了这个困扰,实现了路径与速度无关,任何速度下机器人行走的路径都相同,防止低速示教后高速运行时路径变化导致碰撞。以上是力控系统的金属加工及打磨抛光的分享。洛阳精密力控打磨控制系统

常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。基于力控的打磨抛光机器人能够实现高效率、高质量的自动化打磨,是替代人工打磨的行之有效的解决方案。力控打磨机器人系统由以下几部分组成:工业机器人、六维力-力矩传感器、打磨工具、工作台、路径规划与力控反馈软件系统及PC机。力控打磨机器人主要是打磨力控制技术,通过控制加工轨迹和打磨工具与工件的接触力,以满足力和位置两方面的工艺要求,保证打磨质量。大儒科技的力控打磨系统通过力控制系统控制打磨加工过程,使机器人具备了良好的对接触力感知和控制能力,实现了高效率高质量的自动化打磨过程。用途实时监控、力控反馈、精密微调、稳定高效。
焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿工件本体、焊接过程以及工装所导致的误差,就能实现柔性打磨加工作业。但对于不规则焊缝打磨,除了要定位位置和检测余高之外,还需要准确识别,因此要采用3D视觉检测系统,3D镜头+算法的测量模式,对工件焊缝3D扫描数据进行分析,实现焊缝的识别、准确定位和测量,对焊缝进行智能打磨。木材制品打磨有其行业标准:AQ4228-2012木材加工系统粉尘防爆安全规范,规定了工业生产中木材及木制品、人造板、木粉的加工处理系统中产生的木质及其他纤维质材料的粉尘的防爆安全要求。所以,用于这方面的机器人需为防爆机器人,若没有防爆系统,那必须给机器人穿上防爆外衣,这样可以很大程度上降低粉尘爆燃的风险。
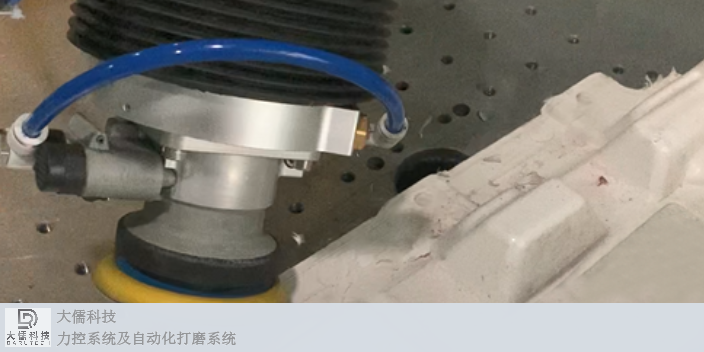
常规钣金箱体焊缝打磨项目简单描述:1.钣金箱体焊接成型后,必须将焊缝磨平。2.箱体焊接后变形,尺寸差异大,且工件装夹精度差。3.一般箱体为多面体,需要多角度打磨。大儒科技智能柔性打磨力控制系统解决方案大儒科技的的力控系统是用于力控打磨,机器人只需要按照示教轨迹做运动,柔性力由力控系统自行完成,用户输入所需要的力值,即可轻松实现智能力控打磨。大儒科技的智能柔性打磨力控系统(ForceControlSystemofintelligentflexiblesaning,简称DFC),前端可搭载多种工具,如气磨机、角磨机、直磨机、砂带机、拉丝机、旋转锉等,适用于不同的应用场景。更多案例访问官网:车窗框焊缝打磨、新能源电池框打磨、新能源电池电极打磨、新能源电池护板打磨等。上海什么是力控打磨现价
本地力控打磨操作简单
打磨是一种表面改性的工艺技术,应用普遍。常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。此外,大批量产品和产品换线频繁的打磨作业,对人工打磨的熟练程度、以及打磨成本效率提出了更为苛刻的要求。打磨机器人系统是一种可以完成大批量产品、各种形状产品或降低甚至消除打磨对人体健康伤害的新型打磨作业模式,能改善工人的工作环境、提高产品的一致性,降低产品生产成本,因而机器人打磨系统应用越来越多。与手持打磨相比较,机器人打磨能有效提高生产效率,降低成本,提高产品合格率,但是由于机械臂刚性及定位误差等因素,采用机器人夹持电动、气动打磨头进行打磨处理时,容易出现断刀或对工件造成损坏等情况,因此影响打磨效率、打磨精度,且无法适应工件的表面复杂形状的变化及产品快速换线要求。而现有的控制系统只能控制机器人位置。为了弥补以上设计缺陷,本发明提出一种柔性打磨控制系统和方法。技术实现要素:为克服现有技术的不足,本发明提供一种柔性打磨控制系统和方法,提高打磨效率以及打磨精度,增加打磨工件的适应范围。本地力控打磨操作简单



