随着社会的发展和科技的进步,人们对工件的外观面要求逐渐变高,因此需要对工件进行打磨工艺,当需要打磨大批量工件,而且工件的内壁面和外壁面同时都需要打磨时,如果采用传统的流水线制作模式,通过人工打磨效率低,同时打磨后的效果得不到保证,综合成本高,且打磨后的碎屑容易残留在工件上,不利于标准化生产。目前在工件加工完成后经常需要使用打磨机对其包面进行打磨,使其表面光滑均匀。现有的打磨机一般均为手持式打磨机,工作人员需要手持打磨机然后对工件表面进行打磨处理。这种方式存在以下缺陷:在面对圆柱形杆或者是圆柱形管等圆形形的工件时,因为工件表面均为弧面,工作人员对工件打磨时比较费力,且打磨出来的工件表面很难保持平整性,很有可能影响后续工件的使用。针对现有技术存在的不足,大儒的只能柔性打磨力控系统具有的打磨过程中的柔性力控制,能帮助工作人员更方便打磨圆柱形工件。浙江直销力控打磨值得推荐

在手机的生产中,我们会运用到打磨机对手机中框或背壳进行打磨工作。现有手机中框或背壳打磨抛光工作主要是由人工、机器人或五轴专机进行打磨作业,对作业人员要求高,打磨产品一致性较差,实现性有难度。且一定程度上打磨产生的粉尘对人体危害大,效率低。智能柔性打磨力控系统以解决上述背景技术中提出现有手机中框或背壳打磨抛光工作,对作业人员要求高,打磨产品一致性较差,体力消耗大,打磨产生的粉尘对人体危害大,效率低的问题。为实现上述目的,智能柔性打磨力控系统直接安装在机器人法兰,下方安装现有的打磨工具,设置参数即可投入打磨作业。与现有技术相比,使用智能柔性打磨力控系统有益效果是:实现打磨过程中的柔性力控制,使打磨装置可满足市场上大部分手机中框或背壳幕和平板电脑屏幕的打磨抛光工作,同时提高工作效率、良品率以及产品打磨抛光质量的一致性,解决了现有手机中框或背壳打磨抛光工作主要是由圆盘机加人工配合进行作业,对作业人员要求高,打磨产品一致性较差,体力消耗大,打磨产生的粉尘对人体危害大,效率低的问题。购买力控打磨研磨
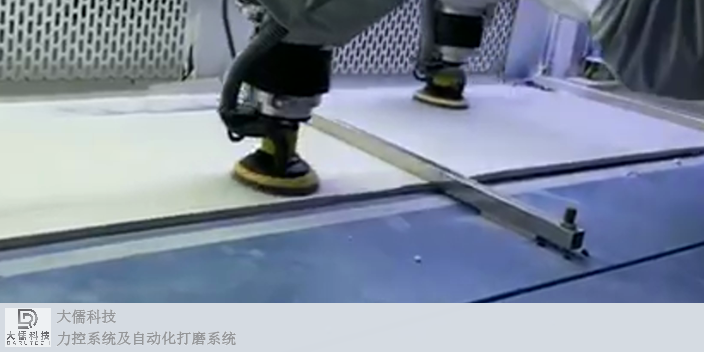
打磨是一种表面改性的工艺技术,应用普遍。常规的打磨方案采用人工打磨,生产效率低,工作周期长,而且精度不高,产品均一性差。尤其是打磨现场的噪声和粉尘污染对工人的伤害特别大。此外,大批量产品和产品换线频繁的打磨作业,对人工打磨的熟练程度、以及打磨成本效率提出了更为苛刻的要求。打磨机器人系统是一种可以完成大批量产品、各种形状产品或降低甚至消除打磨对人体健康伤害的新型打磨作业模式,能改善工人的工作环境、提高产品的一致性,降低产品生产成本,因而机器人打磨系统应用越来越多。与手持打磨相比较,机器人打磨能有效提高生产效率,降低成本,提高产品合格率,但是由于机械臂刚性及定位误差等因素,采用机器人夹持电动、气动打磨头进行打磨处理时,容易出现断刀或对工件造成损坏等情况,因此影响打磨效率、打磨精度,且无法适应工件的表面复杂形状的变化及产品快速换线要求。而现有的控制系统只能控制机器人位置。为了弥补以上设计缺陷,本发明提出一种柔性打磨控制系统和方法。技术实现要素:为克服现有技术的不足,本发明提供一种柔性打磨控制系统和方法,提高打磨效率以及打磨精度,增加打磨工件的适应范围。
5G时代即将到来,手机外壳材料从塑胶到金属又到非金属材质的轮回,塑胶因为成本低,受到中低端市场的青睐。塑胶外壳的材料通常主要用ABS、PC、PPO、PCABS等工程塑料、合金与碳纤维或玻璃纤维的复合材料等,由于对手机壳表面要求高,注塑的产品达不到要求,因此需要对手机壳表面打磨抛光,消除塑胶结合纹,模痕,夹水纹,雾面,霜面,毛刺,废边,清洁和修复划痕等,以使塑胶表面纹路均匀,使塑胶手机壳变成表面光滑和有高光泽度的效果。一、手机塑胶中框及后盖制程注塑-打磨抛光-清洗-喷涂/镀膜/电镀等-检查-下个制程二、手机塑胶壳打磨抛光的问题点:1.来料检查,需要对来料仔细检查,有问题需要马上联系上道工序;2.打磨主要问题塌边塌孔:边缘,四个圆角,摄像头,插卡孔、数据线孔、按键孔等地方;3.接刀痕,打磨不圆润;4.打磨痕,打磨痕太粗喷涂遮不住,调整加工程序及更换更细的海绵砂;5.合模线没打磨干净。
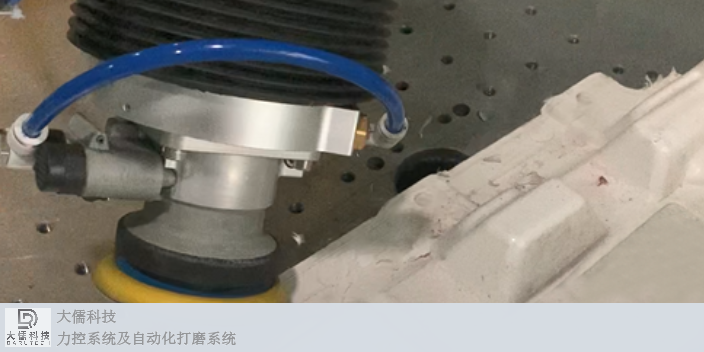
去毛刺飞边机器人是用于材料去除毛刺,锐边处理,或鳍过的金属部件。六轴去毛刺机器人带动铣刀能向人手拿锉刀一样,从铸件四周和上面的任意角度和位置,非常灵活、快速、准确去掉铸件表面的料口和合模线,深孔内部的毛刺及铣通和整理一些应贯通而被铝皮覆盖的孔。工业生产中的部分零配件需要对其外表面进行打磨抛光,比如圆棒工件,现有技术中,采用电机驱动的砂轮对圆棒工件的外表面进行打磨,圆棒工件都有一定的长度,实际打磨时砂轮固定不动,圆棒工件移动,砂轮与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,存在打磨效率低,圆度不一致的缺陷,有待于改善。为解决上述技术问题,智能柔性打磨力控系统安装在机械手上,力控打磨使得不变化圆棒工件安装位置的情况下一次性打磨结束,打磨效率高,工件打磨后的圆度一致性好,简单实用。洛阳什么是力控打磨共同合作
浙江直销力控打磨值得推荐
市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。浙江直销力控打磨值得推荐




