-
 01 12重庆包装达明机器人加工
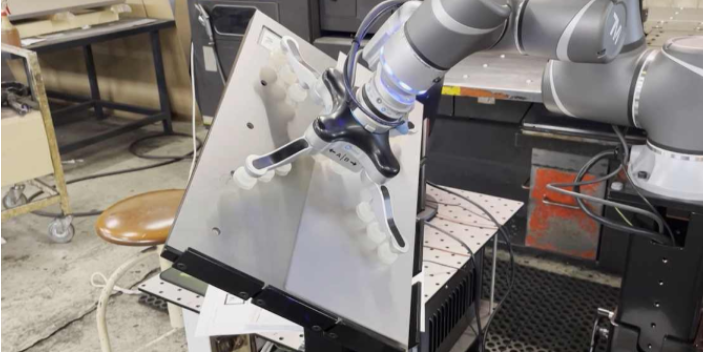
01 12重庆包装达明机器人加工达明机器人移动上下料平台方案,采用移动上下料的方式,代替人工作业。轻量化设计,机器人自重负载比低,移动方便。机器人采用100~240V交流供电,或者22~60V直流供电,功耗300W,供电非常方便。同时达明特有的Landmark标签贴付在CNC设备上。手臂末端相机只需要看一眼,就可以快速补偿移动上下料平台的高度,角度,倾斜度的误差。并立即... 【查看详情】
-
 01 12重庆打磨达明机器人尺寸
01 12重庆打磨达明机器人尺寸随着越来越多的机器人具备了与人类并肩工作的能力,机器换人的潮流似乎势不可挡,一些重复率较高的工作需要生产力更高的方式来替代,使用与人类协同工作的机器人替代人工劳动无疑是比较好的选择。TMROBOT作为一款内建视觉的六轴协作机器人,不仅在制造业得到了的应用,也在咖啡店等服务行业崭露头脚。食品煎炸机器人主要应用在便利商店中,因为油炸食物对于员... 【查看详情】
-
 01 12安徽灵活识别达明机器人
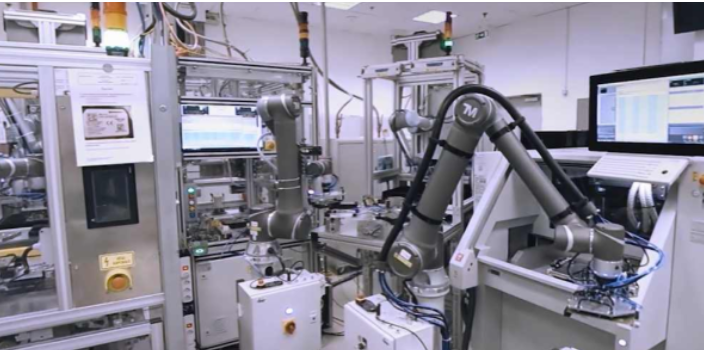
01 12安徽灵活识别达明机器人当AMR使用达明机器人导入制造业等应用时,内建智慧视觉的「眼睛」能弥补自动导引车的行走误差,并精细定位进行快速的取放任务,提高生产稼动率,无须额外整合视觉,降低整合的时间与费用。视觉定位检测可透过TMTMLandmark─跨手臂点位共享的套件,快速复制点位,只需要1个工作日即可快速完成上百个工作站的设定,效率提升数十倍,后续的站点维护也可... 【查看详情】
-
 30 11浙江包装达明机器人定制
30 11浙江包装达明机器人定制3C行业中,产品零部件的分类、贴标签、螺丝锁附、包装等工艺较为常见,采用达明机器人代替人工可实现精细视觉定位并完成一系列工艺要求,助力企业更快的提升智能制造能力和品质。开关模组分类达明机器人配合TMPlug&Play电爪实现不同开关模组的摆放,使得运用更多元化。简单的HMI让用户操作更方便,即使没程式编辑经验者也能轻松上手。透过TM內建视... 【查看详情】
-
 30 11深圳打磨达明机器人工作原理
30 11深圳打磨达明机器人工作原理TMRobotManagementAPI,这是一套让使用者可以在自家厂内的自动化管理系统内,链接达明协作手臂以进行数据监控的API。可供系统整合人员、软件开发人员做进一步的应用。目前推出的版本,主要功能为读取、搜集达明手臂的信息。预计8月还将推出Advance进阶版本,并新增可取得TMRobot控制权的功能、控制机器人控制棒的功能(不含E... 【查看详情】
-
 30 11北京移动搬运视觉AI协作机器人
30 11北京移动搬运视觉AI协作机器人在基本术语中,机器人视觉涉及使用相机硬件和计算机算法的组合,以允许机器人处理来自世界的视觉数据。例如,您的系统可能有一个2D摄像头,可以检测机器人拾取的对象。更复杂的例子可能是使用3D立体相机引导机器人将轮子安装到移动的车辆上。没有RobotVision,您的机器人基本上是盲目的。对于许多机器人任务而言,这不是问题,但对于某些应用,机器人... 【查看详情】
-
 29 11广东汽车门抛光达明机器人厂家
29 11广东汽车门抛光达明机器人厂家TMmanager智慧工厂管理解决方案如何协助各企业实践智慧工厂自动化生产?透过虚实化整合、物联网、智能设备与机器人应用构建适用性高的智能工厂,是达明机器人一直以来努力的方向。因此,达明机器人推出的TMmanager智能工厂管理解决方案功能如下:1.数据收的集与监控系统,提供客户实时的工厂设备管理及设备状态的监控2.工厂制造现场的管控,能... 【查看详情】
-
 29 11抛光打磨视觉AI协作机器人图片
29 11抛光打磨视觉AI协作机器人图片结构光投影三维成像目前是机器人3D视觉感知的主要方式,结构光成像系统是由若干个投影仪和相机组成,常用的结构形式有:单投影仪-单相机、单投影仪-双相机、单投影仪-多相机、单相机-双投影仪和单相机-多投影仪等典型结构形式。结构光投影三维成像的基本工作原理是:投影仪向目标物体投射特定的结构光照明图案,由相机摄取被目标调制后的图像,再通过图像处理... 【查看详情】
-
29 11AMR视觉AI协作机器人机构
利用安装于机器人焊枪行走方向的后部的摄像头,在焊接弧光照射下获取机器人运动后方向的半部熔池变化图像。经过算法提取熔池形状特征如:宽度,半长,面积,形状特征信息等。在根据这些信息,通过控制机结合相应的工艺参数和预先建立的焊接熔池动态过程模型预测熔深,熔透,熔宽和余高等焊接质量参数。调用合适的控制策略给出适当的焊接参数调整以及机器人的运动速度... 【查看详情】
-
 28 11山东灵活识别视觉AI协作机器人分类
28 11山东灵活识别视觉AI协作机器人分类结构光投影三维成像目前是机器人3D视觉感知的主要方式,结构光成像系统是由若干个投影仪和相机组成,常用的结构形式有:单投影仪-单相机、单投影仪-双相机、单投影仪-多相机、单相机-双投影仪和单相机-多投影仪等典型结构形式。结构光投影三维成像的基本工作原理是:投影仪向目标物体投射特定的结构光照明图案,由相机摄取被目标调制后的图像,再通过图像处理... 【查看详情】
-
28 11珠海AOI检测达明机器人加工
TMLandmark坐标系统,无论AMR与手臂位置如何移动,即可透过扫描实时更新手臂与环境点位的相对位置。TM20的超轻量设计搭配高负载能力,符合各产业自动化需求,如半导体后段制程以大量的人力进行上下料、十几公斤以上的晶圆盒及物流的搬运等,因此适用于半导体、3C电子的产业的料件搬运、货物捡取、产品出入库,以及医疗器材、药物的取放与传递等自... 【查看详情】
-
28 11灵活识别达明机器人配件
达明机器人Robot+3DVision+2DVision“手眼”结合,做料箱混料3D分拣定位取料和2D定位Tray供料的功能展示,采用TMETH3D视觉,从混装料箱的内分拣定位并采用手臂取料,并将其放入由2DVision定位的不同Tray内。因2D相机只能获取平面二维的图像信息,因此,当视觉任务中涉及到高度、厚度、深度的三维变化时,2D就... 【查看详情】


