-
 03 09辽宁贴片机贴合系统价钱
03 09辽宁贴片机贴合系统价钱点胶时出现拉丝、拖尾情况怎么办?视觉点胶机在各个领域应用非常普遍,但在使用时或多或少都会遇到点胶机拉丝、拖尾的情况,那么这种情况该如何解决呢?其实啊,出现这种情况可能是:胶水黏度过高、胶水流动不畅、点胶针头或压力不合适、移动速度过快、点胶距离过大等原因,而想要有效解决这些问题,你只需用到旗众智能点胶控制系统。旗众智能点胶控制系统对于这一问... 【查看详情】
-
 03 09深圳手机贴合系统加工
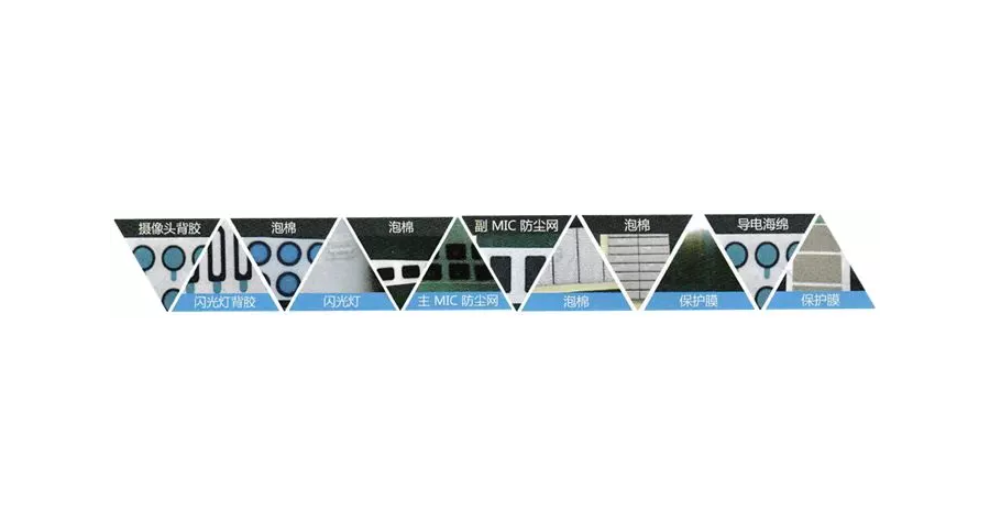
03 09深圳手机贴合系统加工在手机设计中,辅料(如螺丝、胶水等)虽然不如芯片、屏幕等关键部件那样引人注目,但它们也非常重要,因为它们可以影响手机的质量和可靠性。在手机制造中,使用高质量的辅料可以提高手机的耐用性和稳定性,从而增加手机的使用寿命和可靠性。相反,低质量的辅料需要导致零部件松动、损坏、失效,甚至需要在使用中出现安全隐患。因此,手机制造商通常会非常重视辅料的... 【查看详情】
-
 03 09深圳机器人贴合系统企业
03 09深圳机器人贴合系统企业辅料的供应商选择对手机制造过程有以下几个方面的影响:质量控制:辅料的质量直接影响到然后产品的质量。选择较好的辅料供应商可以确保在手机制造过程中使用的各种部件和材料的品质良好,从而提高手机的性能和可靠性。如交货时间:手机制造需要各个环节的协调和同步,其中辅料的供应也是重要的一环。选择供应能够准时交货的辅料供应商可以确保生产计划的顺利进行,避... 【查看详情】
-
 02 09中山点钻机点胶系统解决方案
02 09中山点钻机点胶系统解决方案点胶系统的精度受到多种因素影响,下面是一些主要因素:点胶头设计:点胶头的设计直接影响着点胶的精度。不同类型的点胶头具有不同的工作原理和精度特点,例如针头、喷嘴等。点胶程序控制:点胶程序的设计和控制对精度至关重要。正确的程序设置可以确保点胶在正确的位置和时间完成,同时控制点胶压力和速度。环境因素:环境因素如温度、湿度等会对点胶精度产生影响。... 【查看详情】
-
 02 09深圳CCD视觉贴合系统厂
02 09深圳CCD视觉贴合系统厂要提高手机辅料贴合作业的效率,可以考虑以下几个方面的措施:优化供应链管理:建立稳定的辅料供应链,与可靠的供应商建立长期合作关系,确保辅料供应的稳定性和及时性。采用供应链管理软件和技术,实现辅料采购、库存管理和配送的自动化和优化。自动化生产过程:引入自动化设备和机器人技术,实现辅料的自动喷涂、粘贴和固定等作业,提高生产效率和精度,减少人工操... 【查看详情】
-
02 09中山自动点胶系统供应商
在大量生产中,点胶系统可以采取以下措施来提高效率:自动化操作:采用自动化的点胶系统可以实现高速、连续、准确的点胶操作,节省人力资源并提高生产效率。可以使用机器人或自动化设备来执行点胶任务,减少人工操作的不确定性和时间消耗。多工位设计:如果生产需求较大,可以考虑在生产线上设置多个点胶工位,使多个产品同时进行点胶操作,从而缩短生产周期。这样可... 【查看详情】
-
 01 09中山高速视觉点胶系统实力厂家
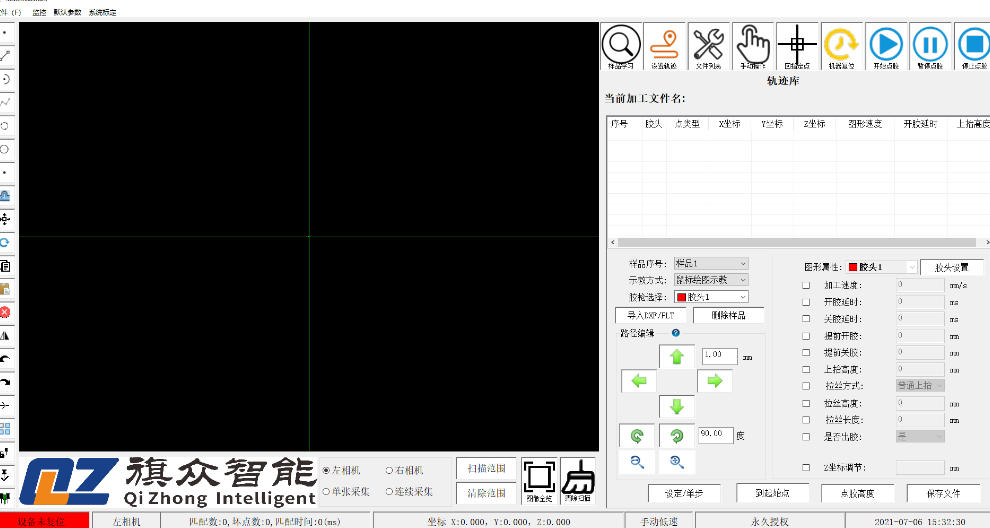
01 09中山高速视觉点胶系统实力厂家单文件多模板功能:该功能主要是针对外观差异较大的同一款产品,可以通过学习多个不同外观的单独模板,有效提高同款产品的识别匹配率;对于多款产品同时加工,也可以把数据保存在一个文件中,一方面便于管理,另一方面提高扫描效率。单文件多模板功能有效解决同一款产品因一致性差而无法一次性加工的难题。旗众智能视觉点胶系统-适用性强。旗众智能视觉点胶系统有着... 【查看详情】
-
01 09深圳流水线跟随视觉点胶系统供应商
视觉点胶系统在人机协作中扮演了非常重要的角色。视觉点胶系统主要是通过摄像头采集工件的图像,然后利用图像处理算法对图像进行处理,从而确定工件表面的几何特征和位置信息。基于这些信息,视觉点胶系统可以生成精确的运动轨迹和点胶路径,并将这些信息传递给点胶机,实现精确定位的点胶操作。在人机协作中,视觉点胶系统可以为操作工人提供实时的视觉反馈,并帮助... 【查看详情】
-
 01 09重庆手机屏幕贴合系统企业
01 09重庆手机屏幕贴合系统企业在辅料使用方面,可持续发展的创新方法可以包括以下几个方面:使用可再生资源:选择使用来源于可再生资源的辅料,如使用可再生植物原料制成的生物降解塑料替代传统塑料。这有助于减少对非可再生资源的依赖以及对环境的负面影响。降低资源消耗:采用更高效的生产工艺或技术,以减少辅料的使用量。例如,通过改进涂料配方和施工技术,降低涂料的涂布厚度,减少使用量,... 【查看详情】
-
 31 08辽宁精密贴合系统品牌
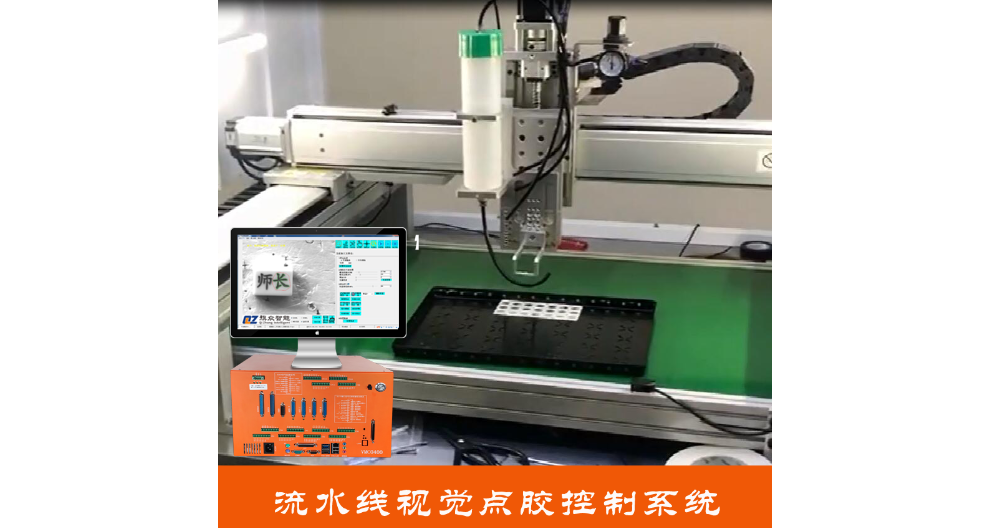
31 08辽宁精密贴合系统品牌流水线跟随点胶系统:旗众智能视觉点胶系统采用的是全区视觉对位系统可以自动跟踪,自动定位识别产品,精度高,可以实现在微小的间隙间进行操作,能快速识别产品中的不良品,自动跳过不需要点胶的产品,从而节省企业生产成本。流水线跟踪点胶功能通过视觉引导,可根据产品疏密自动启停来完成产品加工,事半功倍呢~可灵活架线,还能一直保持点胶作业,让您的加工更得... 【查看详情】
-
 31 08浙江平板电脑贴合系统有哪些厂商
31 08浙江平板电脑贴合系统有哪些厂商在辅料贴合过程中,以下是一些方法可以帮助你避免浪费和损耗:规范化操作:确保操作人员受过专业培训,并遵循规范化的操作流程。这有助于减少操作错误和浪费。控制粘接剂用量:精确测量和控制粘接剂的用量,避免使用过多或过少的粘接剂。可以使用自动化设备来准确地分配粘接剂,确保每次使用的量都符合要求。优化贴合条件:调整贴合的温度、压力和时间等条件,以获得... 【查看详情】
-
 31 08杭州标准视觉点胶系统方式
31 08杭州标准视觉点胶系统方式视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在... 【查看详情】